一、建设背景
随着中国版"工业4.0"《中国制造2025》的出台,基于信息物理系统的智能装备、基于工业机器人的智能工厂等智能制造正在引领制造方式的变革。而制造业乃国民经济之主体,是立国之本、兴国之器、强国之基。打造具有国际竞争力的制造业,是我国提升综合国力、保障国家安全、建设世界强国的必由之路。国家推进制造过程智能化,在重点领域试点建设智能工厂/数字化车间,加快人机智能交互、工业机器人、智能物流管理、增材制造等技术和装备在生产过程中的应用,促进制造工艺的仿真优化、数字化控制、状态信息实时监测和自适应控制。
为了适应国家对高端智能制造设备所需要的高技能人才的培养,
上海朔光科教设备有限公司经多方调研及深度校企合作研发出电气智能化系统安装技术综合考核实训装置。该系统符合"四个定位":即职业技能竞赛的定位;技能培训与鉴定的定位;做一体化教学改革的定位;符合高技能人才培训基地的定位。并符合国家对"关于进一步深化中等职业教育教学改革的若干意见"的文件精神,紧紧围绕以国家职业标准为依据,以综合职业能力培养为目标,以典型工作任务为载体,以学生为中心,根据典型工作任务和工作过程,设计新的课程体系和内容,按照工作过程的顺序和学生自主学习的要求进行教学设计和安排教学活动,实现理论教学与实践教学融通合一,能力培养与工作岗位对接合一,使实习与顶岗工作学做合一,最终培养学生的技术能力、方法能力和社会能力。
基于目前对专业的全新建设,结合现有基础和未来发展思路与目标,在本次规划贵校工业机器人系列实训基地和实训装备建设方面,将全面结合学校开设的专业,以满足教学实训,考核鉴定为基础,重点突出功能,把握建设档次,体现技术水平,力求实现适度超前的规划原则。
二、建设目标
结合学院当前和未来的发展规划目标,本次规划设计的工业机器人技能技能工作室能达到以下目标:
--具备能够满足各专业教学实训的基本技能、综合技能、创新技能,以及中级、高级、技师、高级技师的职业资格和人才培养的需求。
--具备能够满足现代先进技术并紧密结合先进制造业技术发展的新工艺、新知识、新技能、新任务的需求。
--具备能够满足紧缺人才培训,高技能人才培训,农村劳动力转移培训,退役士兵培训,职业能力转换培训等综合培训、鉴定的需求。
--具备能够满足国家骨干师资培训,一体化教学师资培训及其他双师型师资培训等综合性师资培训的需求。
--具备能够满足开展教学研讨,开展技能竞赛,开展学术交流,开展课程改革等等需要的多功能综合性基地的需求。
规划设计的一体化机电专业、电气和自动化专业、工业自动化专业实训基地的实训装备,本着实用性,实操性,职业性,综合性为出发点,其技术优势如下:
技术的先进性 整套方案体现出现代制造业领域中所包含的PLC控制技术、网络通信技术等先进控制理念及管理系统。
--技术的前瞻性 本套方案在基于现代控制理念的基础上,突出体现现代制造业前沿科技的应知点及应会点,如工业机器人控制技术,智能监控技术等。
技术的综合性 集成了光、机、电、气、液、网络通信、数字控制等综合技术的应用,完全覆盖现有机电专业教学大纲及流行教材的训练内容。
技术的职业性 方案所涉及的训练内容,在满足机电专业教学的前提下,结合相关工种的国家职业标准,既能进行培训练习又能用于鉴定考核。
技术的可操作性训练载体体现高起点、高科技、高技能的特点,该套方案配备了完整系统的解决措施,具备配套的课程体系、教学大纲、训练教材及长期稳定的师资培训计划。
技术的兼容性 该方案的技术来源于生产实际,不但能够用于教学训练,还能进行与生产实际相关的典型工作任务,使学校实训与生产实际零距离接轨。
三、 技术性能要求
1. 输入电源:单相220V±10% 50Hz
2. 工作环境:温度-10℃~+40℃ 相对湿度<85%(25℃) 海拔≤4000m
3. 装置容量:≤1kVA
4. 重量:100kg左右
5. 外形尺寸:约1300mm×1200mm×750mm
6. 台面平铺2020欧标工业铝材、右侧台面铺400×1000mm软绝缘胶垫,中部抽拉式电气接线板。
7. 安全保护:具有漏电压、漏电流保护装置,安全符合国家标准
四、基本配置及功能要求
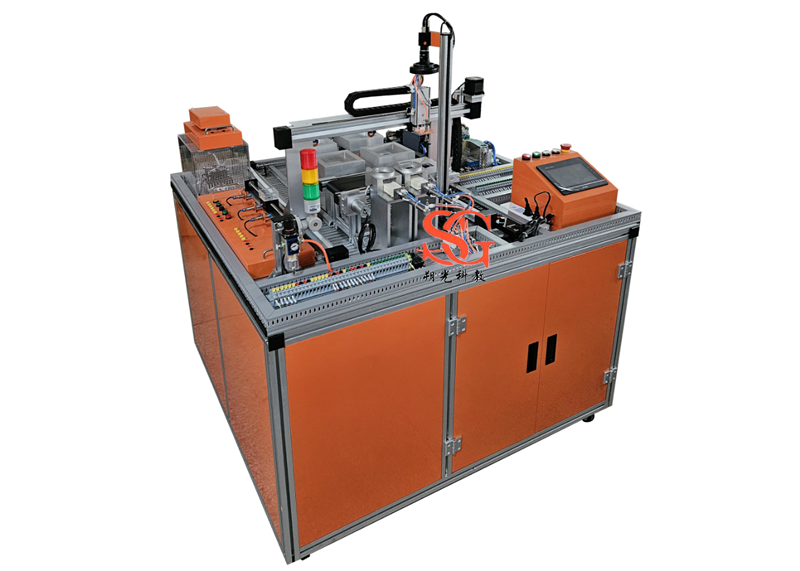
★1、实训装置包括电气接线模块、上料模块、输送线模块、视觉识别模块、三维模组控制模块、称重模块、RFID产品溯源模块、物料摆放模块、小车运动控制模块、温控箱变频控温模块。提供符合上述要求的装置整体设计效果图。
2、以上模块对应以下单元:PLC单元、485通信单元、工业视觉识别单元、RFID产品溯源单元、气动控制基本单元、变频调速单元、触摸屏单元、以太网交换机、伺服系统控制单元等组成、温度检测变送单元。
2.1 、 PLC单元 西门子主机1511C
带显示屏的 CPU;工作存储器可存储 175 KB 代码和 1 MB 数据;位指令执行时间 60 ns;4 级防护机制,工艺功能,运动控制,闭环控制,计数与测量;跟踪功能;PROFINET IO 控制器,支持 RT/IRT,性能升级 PROFINET V2.3,双端口,智能设备,支持 MRP、MRPD,传输协议 TCP/IP,安全开放式用户通信,S7 通信,Web 服务器,DNS 客户端,OPC UA 服务器数据访问,恒定总线循环时间,路由功能;运行系统选件,固件版本 V2.5,带 DI16/DQ16,AI5/AQ2,数字量输入模块 DI 16xDC24V,16 个一组;数字量输出模块 DQ 16xDC24V/0.5A,16 个一组;模拟量输入模块 AI 4xU/I、AI 1xRTD,16 位,5 个一组;模拟量输出模块 AQ 2xU/I,16 位,2 个一组;6 个通道用于计数与测量,带增量式编码器 24 V(最高 100 kHz);4 个通道用于 PTO,脉宽调制,频率输出(最高 100 kHz)
视觉识别单元
2.2、工业视觉检测系统包括相机、镜头、处理软件、光源等组成。工业视觉检测系统放置在输送线一测,对工件进行颜色,尺寸,标识等信息检测。
2.2.1、检测结果通过总控通讯,为后续摆放等作业做好准备。
2.2.3、600 万像素 1/1.8" CMOS 千兆以太网工业面阵相机,传感器类型CMOS、卷帘快门,传感器型号 Sony IMX178,像元尺寸 2.4 m × 2.4 ?m,靶面尺寸 1/1.8",分辨率 3072 × 2048,动态范围 71.3 dB,曝光时间 25 μs ~ 2.5 sec,快门模式 支持自动曝光、手动曝光、一键曝光模式,支持 Global Reset 和 Trigger Rolling功能,像素格式Mono 8/10/12 Bayer RG 8/10/10Packed/12/12Packed YUV422Packed,YUV422_YUYV_Packed RGB 8,BGR 8,数据接口 Gigabit Ethernet(1000Mbit/s)兼容 Fast Ethernet(100Mbit/s),数字 I/O 6-pin P7接头提供供电和 I/O:1路光耦隔离输入(Line0),1路光耦隔离输出(Line1), 1 路双向可配置非隔离 I/O(Line2)
2.2.4、镜头:镜头接口 C-Mount 外形尺寸 29 mm × 29 mm × 42 mm
2.2.5、连接电缆与支架
2.2.6、软件要求
① 软件可进行曝光时间,白平衡设置。
② 进行四点相机标定,能快速读取标定模板的像素值,可获取对应的位置值。
③ 可进行日志显示,并可以清楚历史日志。
④ 可进行至少8个模板匹配,即触发1次拍照,匹配模板1,模板1匹配成功,发出模板1数据;若模板1未能匹配成功,视觉返回s1,0,0,0数据给机器人,机器人发命令继续匹配模板;
⑤ 可进行发送可接收数据显示。
⑥ 软件输出4个数据:类型、X、Y、旋转量
⑦ 支持绘制的模板可以进行集合运算;
⑧ 绘制模板可以使用长方形,圆形,自由绘制等方式进行绘制模板;
⑨ 在机器人视觉系统软件中,拍照的图像可以自由的拖动及放大;
⑩ 支持实时采集及单独拍照;
11 在机器人视觉系统软件中,有红色十字光标方便安装调节相机位置。
2.3、RFID识别单元:RFID射频单元带集成天线的方型读写器(RS422);50×50×30 mm(L×D×H)
标签使用螺纹式小尺寸标签。
2.4、触摸屏单元
1.显示模块:≥7"TFT
2.显示色彩:≥65536彩色
3.分辨率:≥800×480像素
4.背光类型:≥LED 亮 度 300cd/m2
5.液晶寿命: ≥50000小时
6.触控面板:4线精密电阻网络(表面硬度不低于4H)
7.CPU: ≥800MHz RISC
8.存储器: ≥128MB闪存+64MB 内存 RTC
9.通讯接口:COM0:RS485-2W/4W, RS232; COM2: RS232
2.5、 以太网交换机:
1.以太网交换机采用非网管型工业以太网 100MBIT/S交换机,自带5个双绞线端口,RJ45 接口;
2.用于构建小型星形和总线形拓扑结构;自带LED诊断显示,供电电源DC 24V 。
3.不低于IEC/EN 61000-4工业级防护,不低于IP30防护,9.6-60VDC三冗余电源输入,多重保护。
2.6、 变频调速单元:
1.单相220V供电,输出功率0.37KW。
2.集成RS-485通讯接口,提供操作面板;
3.具有线性V/F控制、平方V/F控制、可编程多点设定V/F控制,磁通电流控制、直流转矩控制;
4.集成4路数字量输入,2路模拟量输入;
5.具备过电压、欠电压保护,变频器、电机过热保护,短路保护等。
2.7、小车运动控制单元:主要由运动小车(直流电机驱动)、同步带轮传动机构、直流电机、光电传感器、电感式传感器、电容式传感器、行程开关等组成,通过传感检测、PLC编程,实现运动距离测量、传动控制、键值优化比较行走控制、定向控制、报警运行控制、点动控制等,能实现小车的精确定位。该系统外观精美,体积紧凑,重量轻。提供符合上述功能的小车运动控制单元设计效果图。
2.8、三维模组控制单元:
1.三维丝杆或同步带控制单元主要由伺服驱动和步进驱动组成。
2.伺服驱动用于控制X轴,采用交流伺服驱动,工作电压AC220V,输出功率200W。
3.采用数字信号处理器(DSP)作为控制核心,智能功率模块(IPM) 内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力。
4.支持位置、速度和力矩三种方式对伺服马达进行控制。
5.步进电机驱动用于控制Y轴,采用交流伺服驱动,工作电压DC24V,输出功率>=30W;
6.内部集成控制电路和功率电路,具有自检线圈和短路保护等功能。
2.9、 温控箱变频控温模块:加热板通电加热,温度变送器检测加热板到达一定温度后,PLC控制系统控制台达变频器使电机旋转,带动扇叶加强空气流动,快速散热,使箱内环境温度稳定。
2.10、温变变送器。
1.二线制输出,无需补偿导线;
2.温变变送器结构简单安装方便,使用寿命≥10000次;
3.结构简单,合理安装方便;小型化,安全可靠,使用寿命长;
4.插头式温度变送器,量程0-100OC,电源24VDC,输出0-10V。
2.11、加热器:工作电压AC220V、持续功率30W-150W、外壳材质铝合金、尺寸不大于160*100。
2.12、 伺服系统控制单元:输入电源单相或三相AC220V,-15~+10%,50/60HZ,调速比1:5000,脉冲频率<500KHZ,控制输入:伺服使能、报警复位、紧急停止、指令脉冲禁止、脉冲偏差清除、零件速钳位、正向行程限位、反向行程限位、内部速度选择1等。控制输出:伺服准备好、定位完成、零偏差、零速度、报警检出、紧急停止检出,
2.13、称物体重量或压力并触摸屏显示重量值:称重传感器、重量变送器、称重不锈钢承重板,可称重0-10KG。