PRODUCT
时间:2025-06-10 15:00:42

一、产品简介
本产品由6轴协作机器人、焊接工作台、智能焊接电源、机器人空冷焊枪、集成式清枪站、烟尘净化器、保护气瓶和安全防护装置等组成。可以根据实际需要完成相应焊接任务,让学生掌握基本的焊接技巧与方法,配套说明书和实验指导书,适用于培养专业的机器人自动化焊接应用人才。可用于焊接系统原理教学、机器人编程教学、焊接电气接线教学及焊接工艺研究等。
二、产品特点
灵活性和快速部署:采用柔性焊接工作台设计,满足各种工件的焊接作业部署。
易用性:协作机器人的编程简单直观,甚至可以支持拖拽示教,使得普通操作工也能快速上手。这大大减少了对专业编程技能的依赖,提高了生产效率。
焊接工艺包:自主研发的焊接工艺包,支持直焊、圆弧焊、包角焊、多层多道焊等多种焊接工艺。充分满足各种焊接作业的需求。
三、整机参数
占地尺寸(含防护围栏):4m(长)×4m(宽)×2m(高)
整机功率:≤4kVA
适用电源:三相AC 380V±10%(50Hz)
温度:0~50℃;环境湿度:≤90%无水珠凝结;
安全保护:具有接地、漏电压、漏电流、断电保护,安全指标符合国家标准。
四、设备与功能模块
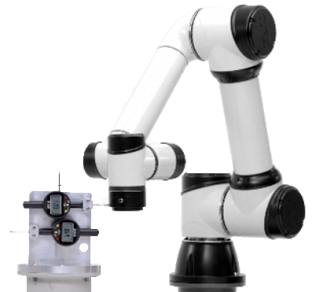
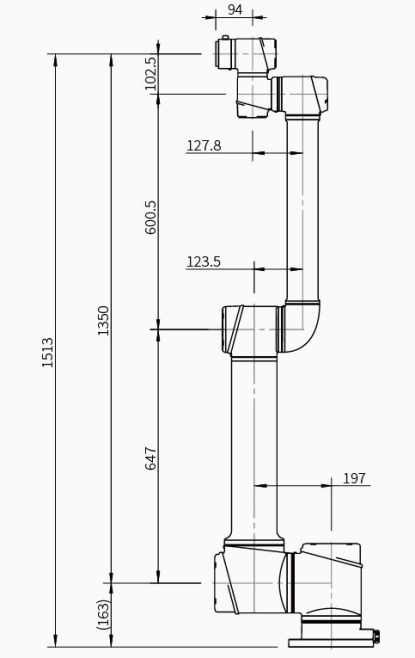
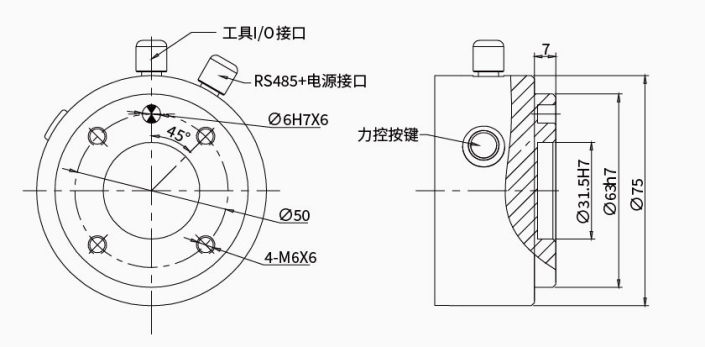
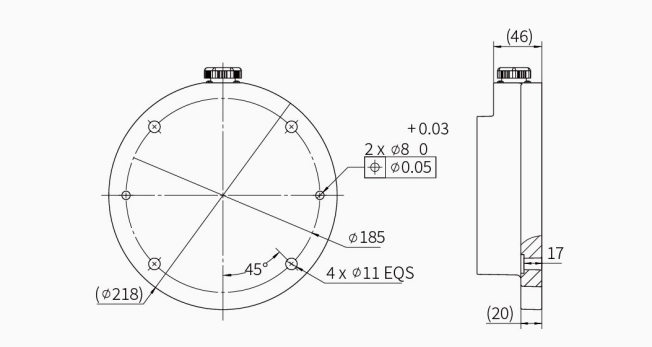
4.1 智能协作机器人



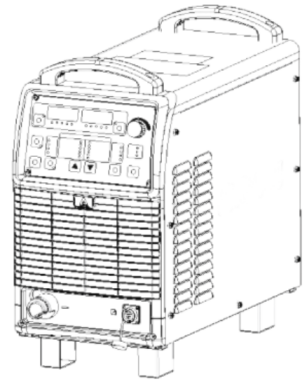
4.2 智能焊接电源
智焊接电源具有脉冲、恒压、低飞溅三种焊接模式,可以实现碳钢及不锈钢、铝及其合金等金属的焊接。
焊机采用全数字的控制方式与机器人进行通讯,通过焊接机器人工艺包直接控制焊接参数。焊接飞溅极小,焊缝成型美观。优化的引弧、收弧以及去球功能。全数字化控制系统,实现焊接过程的精确控制、弧长稳定强大的数字报错功能,多种故障都有错误代码进行显示。系统内置焊接专家数据库,自动智能化参数组合。操作界面友好,一元化调节方式,易于掌握。软开关逆变技术,整机可靠性高、节能省电。
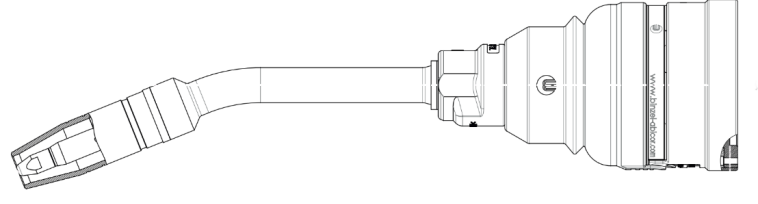
4.3 机器人焊枪
机器人焊枪通过内置空冷方式,采用枪颈连接模块、紧凑且坚固的防撞器,不同电流大小的枪颈使用同一根电缆,负载应用范围广,可以广泛用于钢结构、压力容器、管道焊接两轮车、健身器材等中厚板以下的碳钢自动化焊接应用。
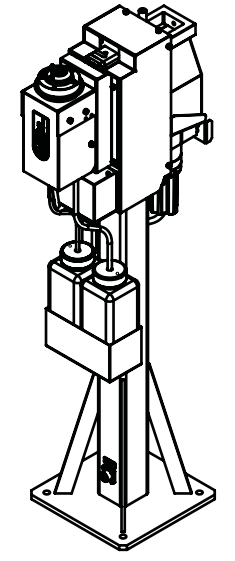
4.4 清枪剪丝装置
1.防飞溅剂喷射功能
仅靠机器人运动触发,高效喷雾,低能耗,残余防飞溅液可收集,全面保护环境清洁。
2.焊渣清理功能
适配各类焊枪、可定制的铰刀,无需调整-适合所有喷嘴尺寸的V型块,结实、高品质气动马达,高效的焊渣清理,彻底的无污垢灰尘防护,夹紧活塞杆的滚花端面可以增加夹持力并让焊枪保持在位置上。
3.剪丝功能
产品结实、剪切可靠;焊丝切口整齐、利于起弧;高硬度剪丝刀片,使用寿命长;开口剪丝模块让焊枪易于“进入”,简化剪丝示教编程
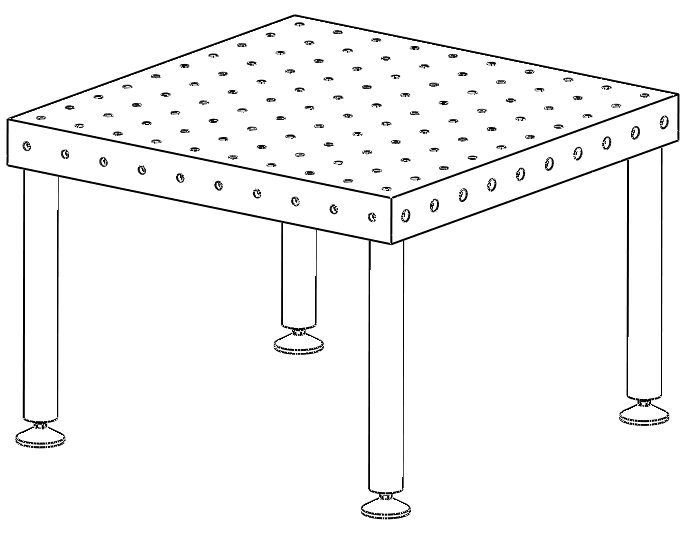
4.5 柔性焊接工作台
柔性焊接工作台具有阵列通用固定孔,可根据焊接需求对工件进行快速柔性拆装。
4.6 烟尘净化器
生产操作过程中产生的烟尘由于风机引力作用通过吸气罩口吸入移动式焊接烟尘净化器,首先经过净化器进风口处的第一层阻火网,可对大颗粒及打磨产生的火星颗粒进行分离截留,初步过滤后的烟尘经过滤芯防护板,进一步对颗粒和残留火星遮挡,过滤后的烟尘进入主过滤芯(主过滤芯选用进口覆膜聚酯纤维材质,过滤效率达到99.9%),净化后的气体再经过活性炭过滤棉进一步的净化后经出风口达标排放。

4.7 工具及配件
压块*4个,胶锤*1个,锤子*1个,内六角扳手*1套,钢直尺30cm*1把,角尺30cm*1把,磁力表座*2个,焊接检验尺*1把,斜口钳*1把,老虎钳*1把。
五、实训项目
|
第一章 平台概述 |
|
1.技术参数 |
|
2.特色功能 |
|
3.设备与功能模组 |
|
4.实训平台安装 |
|
第二章 作机器人基础实训 |
|
实训一 机器人硬件认知与安装 |
|
实训二 机器人程序管理 |
|
实训三 机器人点位示教 |
|
实训四 机器人IO控制 |
|
实训五 机器人末端工具控制 |
|
实训六 机器人在线指令编程 |
|
第三章 机器人智能焊接实训 |
|
实训一 工作站流程示范与操作 |
|
实训二 焊接工艺包参数配置 |
|
实训三 焊接角度、焊接电流、焊接电压及摆弧对焊接质量影响的介绍 |
|
实训四 机器人焊接编程实训 |
|
第四章:遨博AUBO脚本编程与二次开发 |
|
实训一 机器人脚本编程开发 |
|
实训二 python编程与机器人控制 |
|
实训三 基于SDK的C编程机器人运动控制 |
|
实训四 机器人状态信息远程采集与运维监控 |
六、产品详细参数
|
序号 |
名称 |
参数 |
数量 |
|
1 |
协作机器人 |
协作机器人本体: |
1套 |
|
2 |
智能焊接电源 |
控制方式:数字IGBT 控制 |
1套 |
|
3 |
机器人焊枪 |
额定值:350 A CO2 /300 A混合气 |
1套 |
|
4 |
集成式凊枪站 |
控制电压:DC24V |
1套 |
|
5 |
柔性焊接工作台 |
尺寸:1m×1m×0.7m |
1套 |
|
6 |
烟尘净化器 |
处理风量:1500m³/h |
1套 |
|
7 |
工具与配件 |
压块*4个,胶锤*1个,锤子*1个,内六角扳手*1套,钢直尺30cm*1把,角尺30cm*1把,磁力表座*2个,焊接检验尺*1把,斜口钳*1把,老虎钳*1把 |
1套 |
|
8 |
安全防护装置 |
安全围栏,防弧光板,尺寸可定制 |
1套 |
|
9 |
实训教学资源 |
提供机器人技术课程资源,教学实训指导手册等 |
1套 |
七、仿真软件(网络版、具有软件著作权)
1、工业自动化数字孪生仿真软件(具有软件著作权)
(1)功能:
信息化虚拟仿真上位机,交互式软件接口实现与下位机通讯。采用软件建模及上位机界面设计,实现与下位机的通讯功能(USB、Wifi、以太网协议),实现上位机的虚拟仿真。
将设备的PLC控制程序下载到真实PLC中,3D仿真模型和仿真数据驱动器取代实物设备受PLC程序控制并反馈相关的传感器信号。仿真模型接收数据后驱动3D模型运行,运行中机构对应的传感器等信息通过仿真驱动器IO输出端输出到PLC及自动化控制系统的输入端。
仿真数据驱动器通过IO输入端采集送料模型、机械手搬运模型、物料传送分拣模型的输出控制信息,将输出控制信息通过USB通信传送给上位机仿真模型
(2)仿真软件模型包括:
① 颗粒上料单元自动化工作站,包括工作台,型材台面,上料筒2个颗粒推送气缸2个,双皮带分拣输送带1条,双工位旋转吸料机构1个,瓶子上料输送带1条,填装输送皮带1条,填装气动定位机构1个。
② 盖拧盖单元自动化工作站,包括工作台,型材台面,加盖机构1个,拧盖机构1个,输送带1条,定位机构2个。
③ 检测分拣自动化工作站,包括工作台,型材台面,龙门检测机构1个,不合格品分拣机构1个,输送带1条,定位机构1个。
④ 立体仓库自动化工作站,包括工作台,型材台面,仓库构架1个,2轴垛机机构1个。
3、机器人虚拟拆装及应用仿真软件
机器人虚拟拆装及应用采用3D技术与交互式动画相结合的方式,仿真拆装工业机器人机构结构,通过对机器人的3D模拟仿真拆装训练,可以将每个轴拆卸成独立的零部件,也可以用独立的零部件装配成每个轴,让学生掌握工业机器人的硬件组成、机器人结构分析、机器人电机安装、谐波减速器安装、同步带安装、日常保养等机器人维护技巧。
机器人虚拟拆装及应用设有3大功能:工业机器人装配、工业机器人拆卸和工业机器人应用。
工业机器人装配
工业机器人装配中有1-6每个轴的装配动画和模拟装配,在装配动画中用户可以直观、任意角度地看到每个轴的装配过程。模拟装配中用户可以选择对应的零部件进行装配,整个装配过程都会有语音和文字提示。
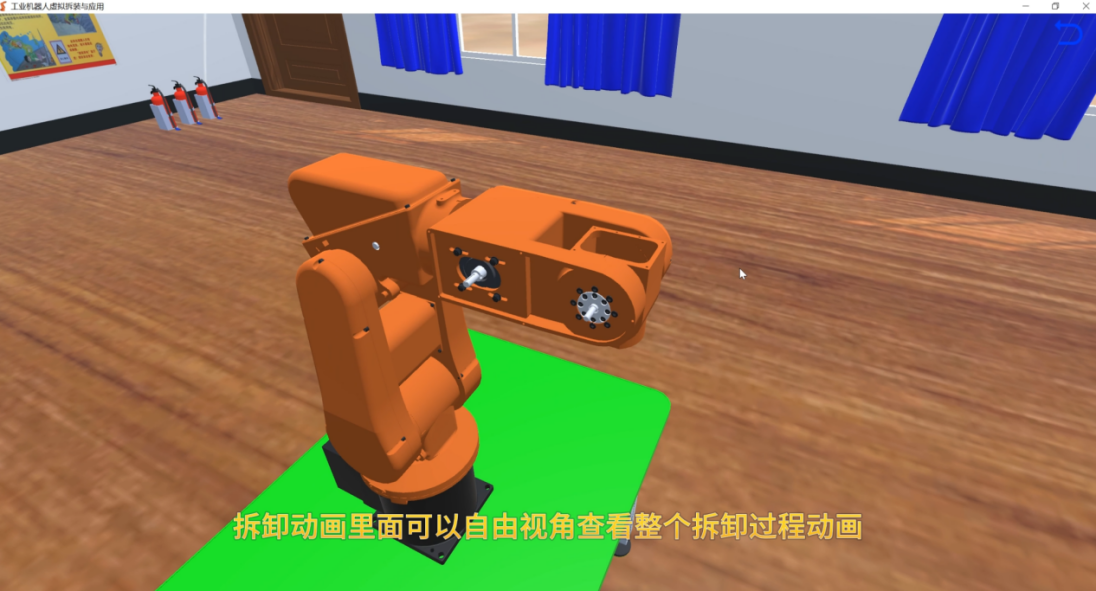
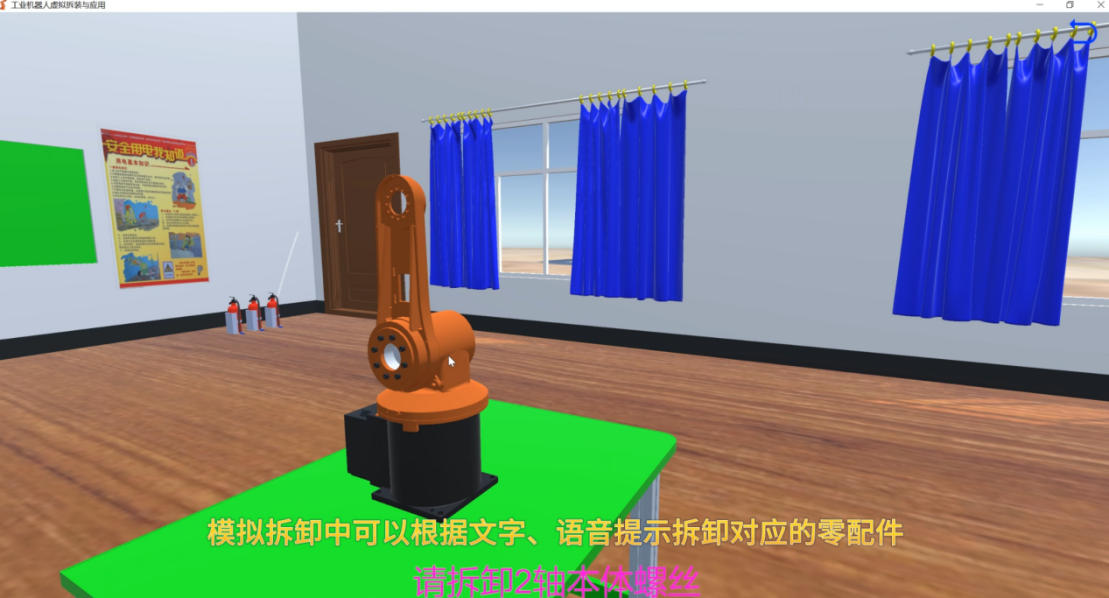
工业机器人拆卸
工业机器人拆卸中有1-6每个轴的拆卸动画和模拟拆卸,在拆卸动画中用户可以直观、任意角度地看到每个轴的拆卸过程。模拟拆卸中用户可以选择对应的零部件进行拆卸,整个拆卸过程都会有语音和文字提示。
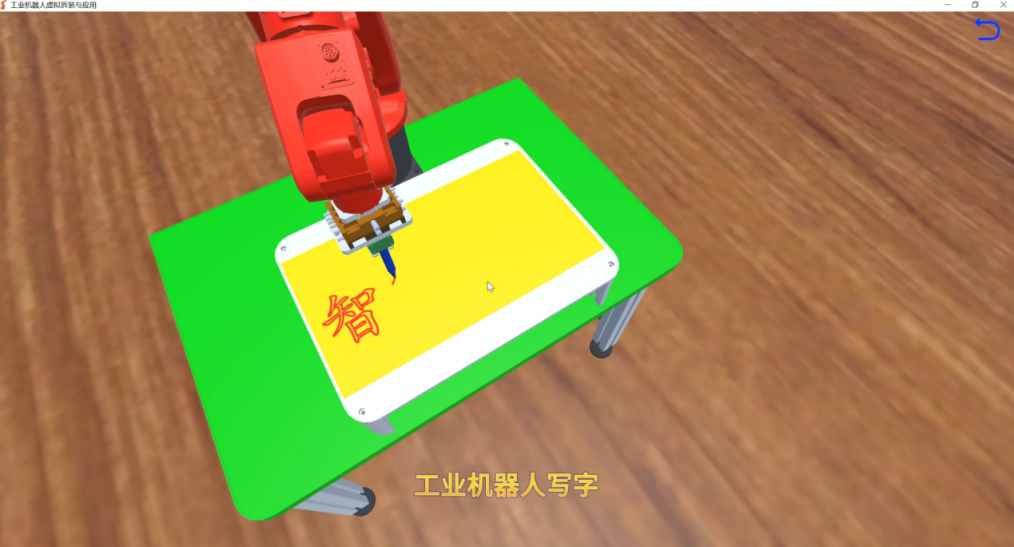
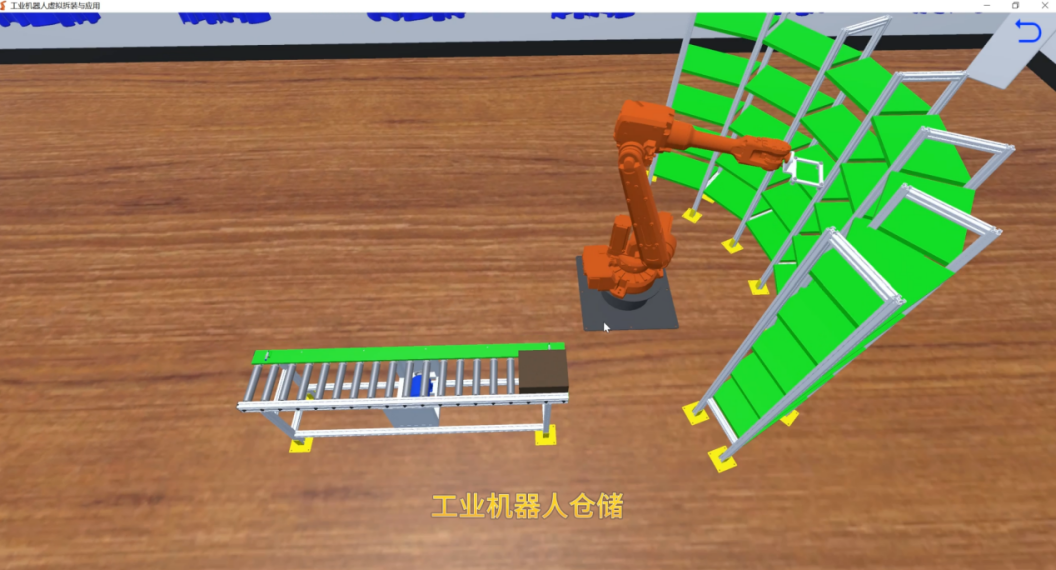
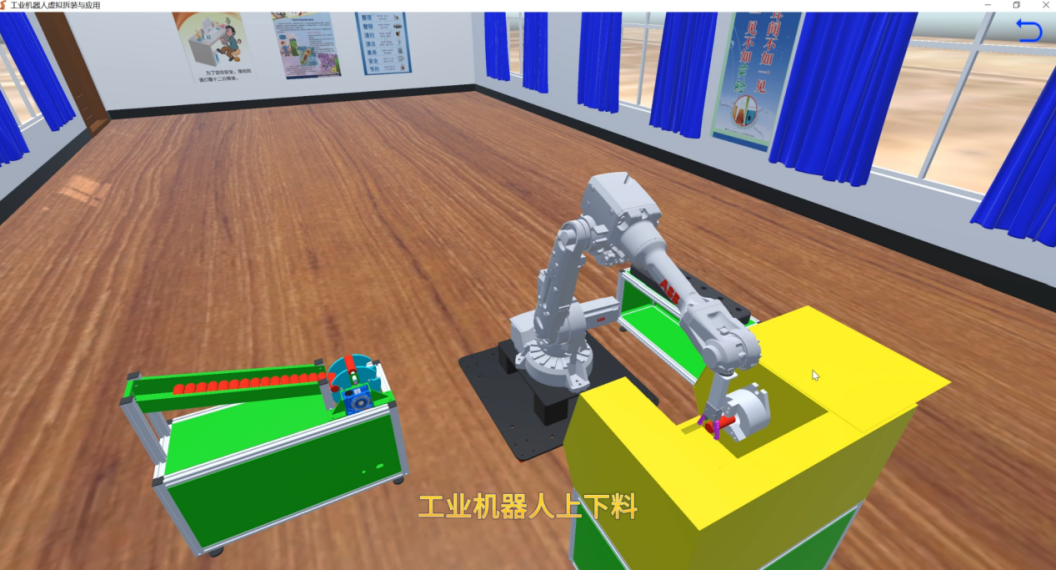
工业机器人应用
工业机器人应用中提供了机器人搬运、机器人写字、机器人码垛、机器人仓储、机器人上下料、机器人装配等常用工业机器人场景,用户可以直观、任意角度地看到工业机器人的运行示例。