PRODUCT
时间:2025-06-10 15:49:51

| 序号 | 设备名称 | 备注 | 单位 | 数量 |
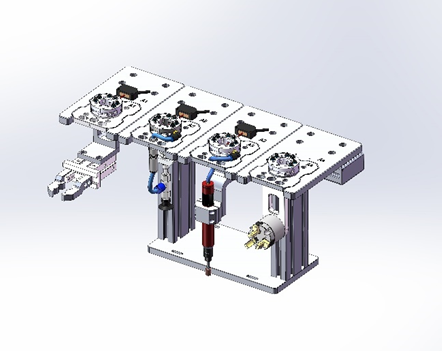
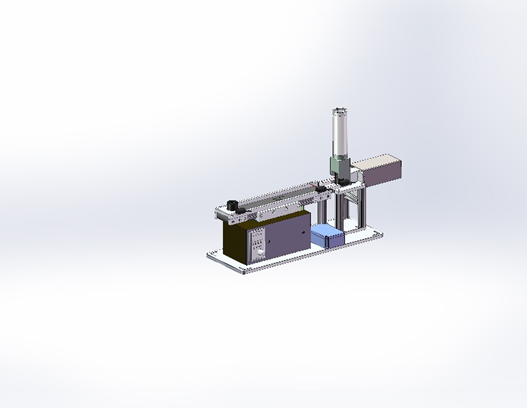
| 1 | 工业机器人系统操作员实训平台 | 整套设备 | 套 | 1 |
| 工业机器人系统操作员实训平台 | ||
| 序号 | 名称 | 数量 |
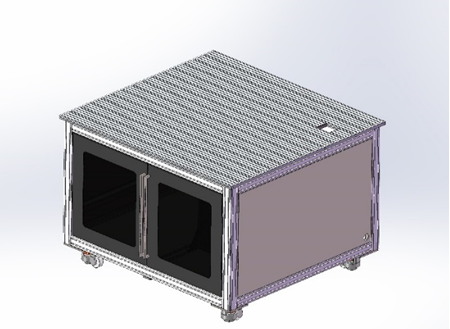
| 1 | 基础实训平台 | 1 |
| 2 | 机器人本体 | 1 |
| 3 | 夹具模块 | 1 |
| 4 | 绘图模块 | 1 |
| 5 | 圆柱体搬运模块 | 1 |
| 6 | 码垛模块 | 1 |
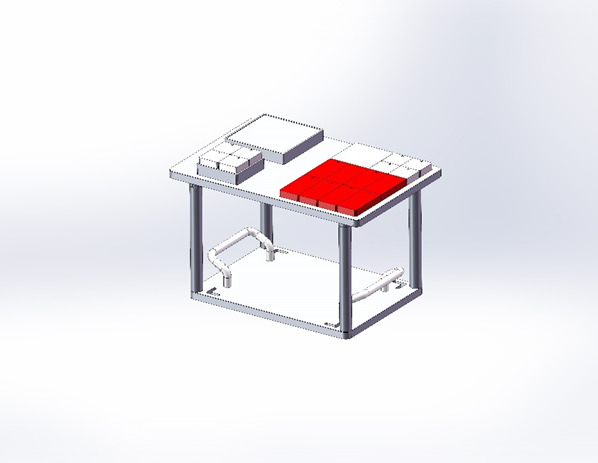
| 7 | 通用仓储模块 | 1 |
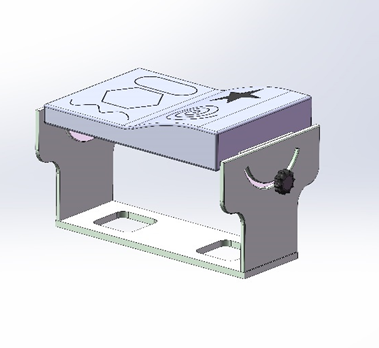
| 8 | 运输模块 | 1 |
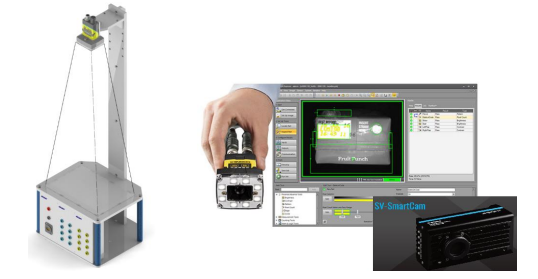
| 9 | 视觉检测模块 | 1 |
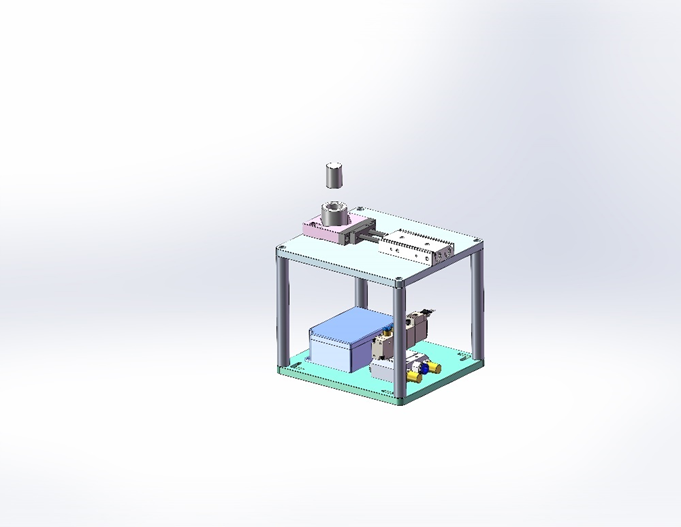
| 10 | 伺服模块 | 1 |
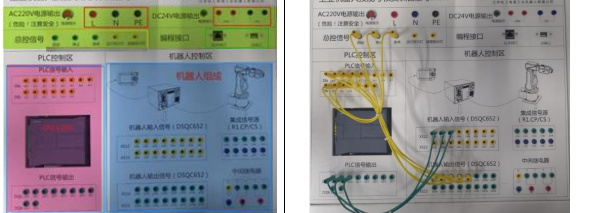
| 11 | 电气控制套件模块 | 1 |
| 12 | 仿真软件(网络版) | 1 |
| 13 | 静音无油气泵 | 1 |
| 14 | 编程工作台 | 1 |
| 15 | 配套教材、实训指导书、数字资源包 | |

| 型号 | ER-4iA | |
| 自由度 | 6 | |
| 轴工作范围及速度 | J1 轴 | 340°(460°/s) |
| J2轴 | 230°(460°/s) | |
| J3 轴 | 402°(520°/s) | |
| J4 轴 | 380°(560°/s) | |
| J5 轴 | 240°(560°/s) | |
| J6 轴 | 720°(560°/s) | |
| 定位精度(mm) | ±0.02mm | |
| 额定负载 | 4kg | |
| 最大工作半径 | 550mm | |
| TCP 最大速度 | 4000mm/s | |
| 防护等级 | IP30 | |
| 通信功能 | modbus,可扩展配置其他总线通讯功能如profinet等 | |