PRODUCT
环境工程实验装置
流体力学实验室设备
热工类教学实验装置
化工原理实验装置
化工单元操作实训装置
制药工程实验装置
化学工程化学工艺实验装置
教学实验箱
机械创新教学模型
机械示教陈列柜
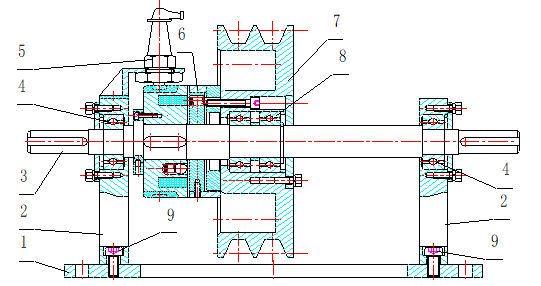
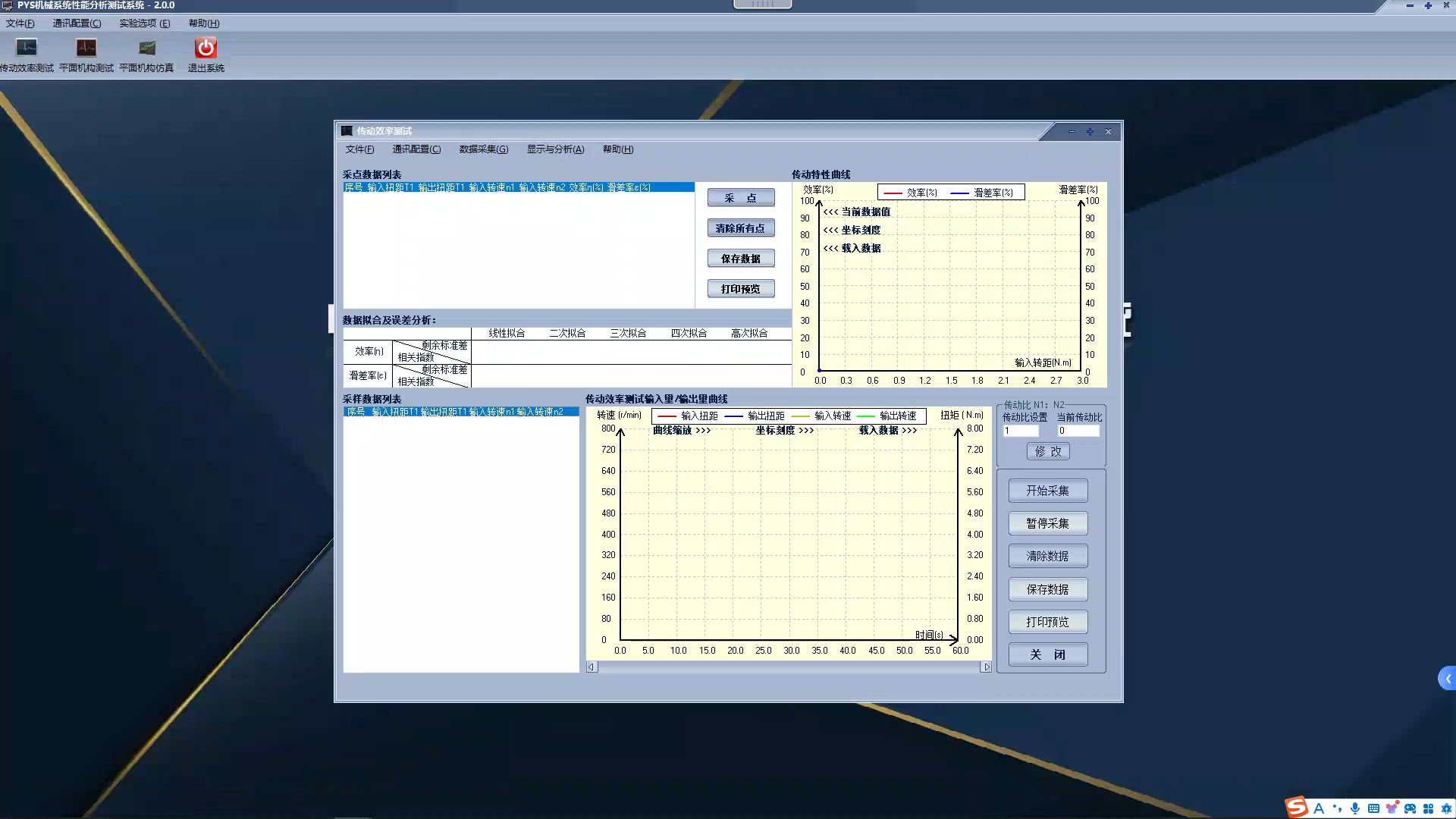
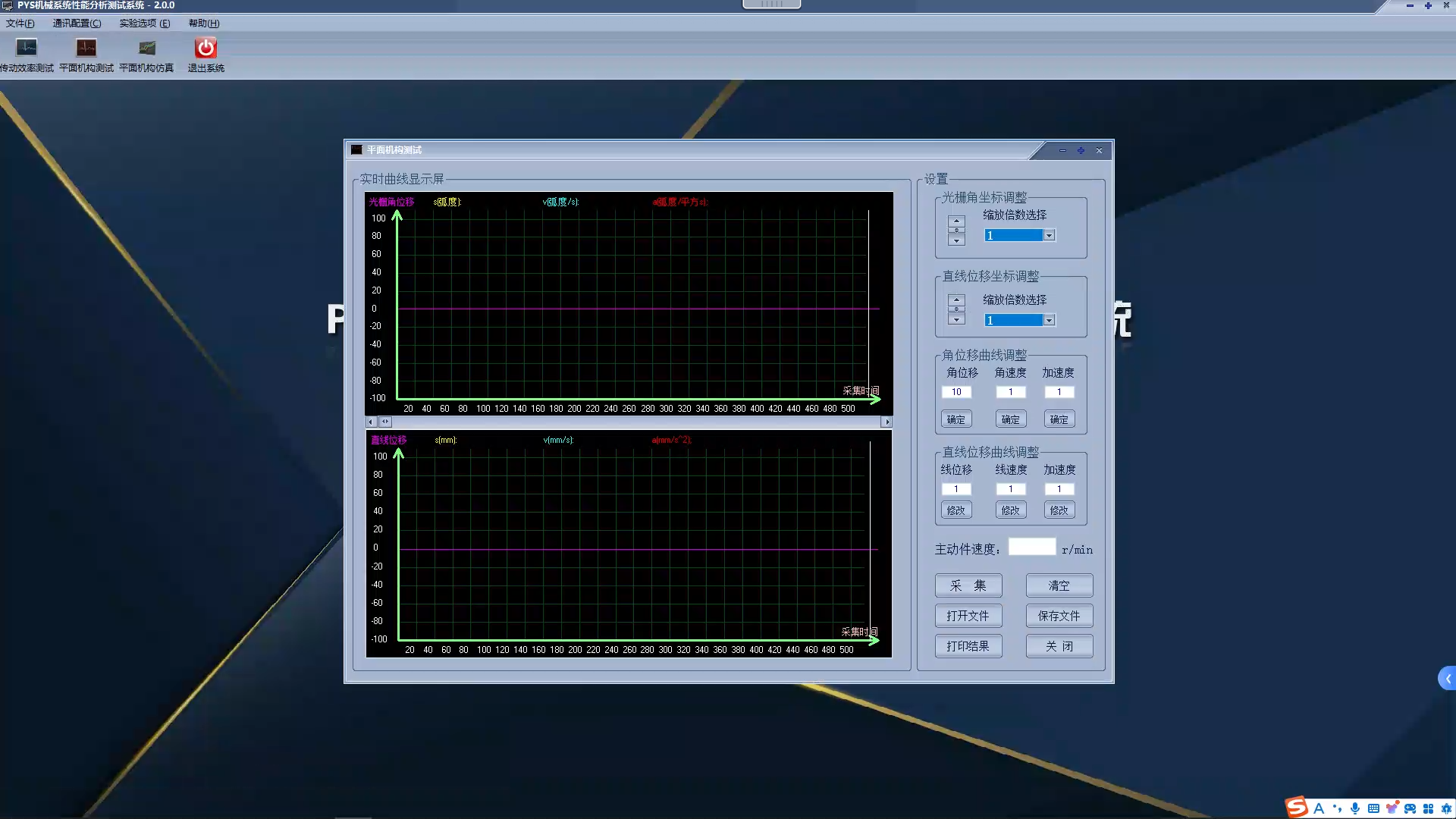
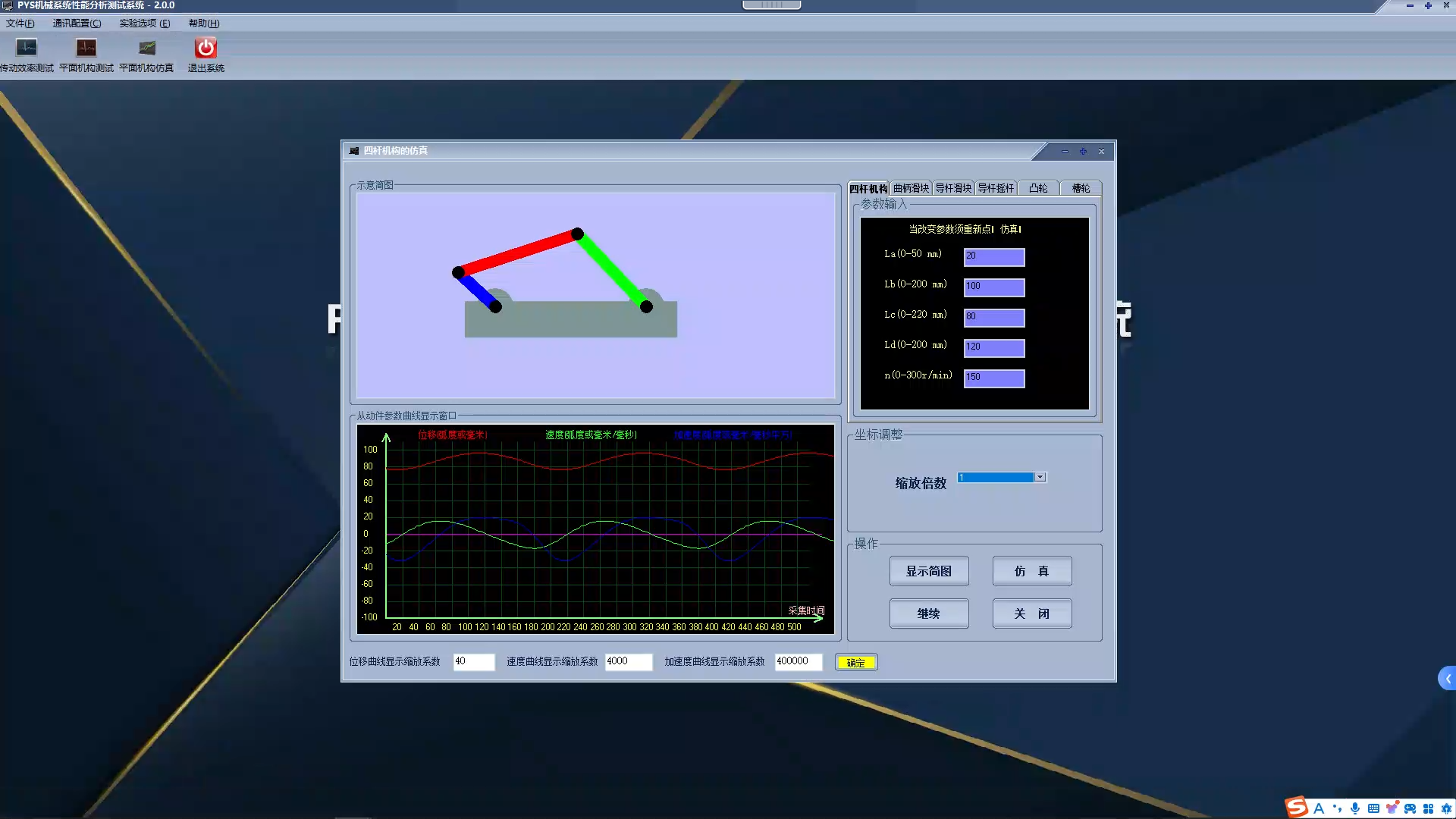
机械多媒体仿真设计综合实验装置
机械试验设备
化工过程控制实训装置
电工、电子、电拖技能实训设备
立式通用电工、电子、电拖实训设备
电子技能及生产工艺实训设备
高性能电工、电子、电拖、电气实训设备
维修电工实训考核设备
供配电技术实训装置
工厂电气控制供电实训装置
PLC可编程实训装置
PLC编程及自动化实验室设备
家用电器实训设备
PLC控制液压与气动实训装置
机电一体化实训设备
工业自动化实训装置
工业机器人实训设备
数控机床电气维修实训考核设备
机床电气技能培训及考核装置
钳工实验台、焊铆工实训设备
智能楼宇实训设备
工程制图实验室设备
财会模拟实验室设备
风能、太阳能发电实训装置
煤矿安全技术培训装置
轨道交通实训系统设备
船舶工程技术实训装置
机械工程技能实训设备
工程机械模拟教学仪
单片机微机实验装置
传感器综合实验台
空调制冷制热实验室设备
透明仿真教学电梯模型
理化生实验室设备
汽车模拟驾驶器
新能源汽车教学实训装置
汽车发动机实训设备
汽车全车电器实验台
汽车空调系统实验台
汽车实物解剖模型
汽车底盘实训设备
汽车变速器实训台
汽车发动机拆装及翻转架设备
汽车整车综合实训系统
透明汽车教学模型
汽车程控电教板
汽车示教板
汽车驾校培训设备
汽车实验箱
立式通用电工电子电拖实验室成套设备
电工、模电、数电、电气控制实验室设备
高级电工、电子、电机实验室设备
电工、电子、电气、电机实验室设备
摩托车实训设备
心肺复苏模拟人
通用技术实验室设备
劳技实验室设备
采暖通风和空调制冷实验装置
农机教学设备
军用车辆实训教学设备
注塑机演示模型
无人机装配综合实训装置
智能网联汽车实训设备
时间:2025-09-13 10:59:38